Наиболее простым, дешевым и надежным электрическим двигателем является асинхронный короткозамкнутый двигатель, поэтому его использование в регулируемом электроприводе представляет особый интерес. Как было установлено, возможности регулирования, аналогичные возможностям изменения напряжения на якоре двигателя постоянного тока с независимым возбуждением, в асинхронном электроприводе обеспечиваются путем изменения частоты напряжения и тока статорной обмотки. Для реализации этих возможностей необходимо осуществлять питание статорной обмотки двигателя от управляемого преобразователя частоты.
Регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, так как, как правило, требует дополнительных ступеней преобразования энергии.
Наибольшее число ступеней преобразования характерно для электромашинных преобразователей частоты. Для регулирования частоты вырабатываемого синхронным генератором напряжения необходимо регулировать его скорость. Для этой цели привод генератора необходимо осуществлять либо по системе Г-Д, либо по системе ТП-Д. Электромашинный преобразователь частоты содержит соответственно два преобразовательных агрегата: асинхронный двигатель, вращающий генератор постоянного тока, и двигатель постоянного тока, вращающий синхронный генератор с регулируемой скоростью. Электропривод с таким преобразователем частоты имеет пять ступеней преобразования энергии, увеличенные примерно в 5 раз массу, габариты и стоимость (по сравнению с нерегулируемым электроприводом), ухудшенный КПД, и его использование экономически нецелесообразно.
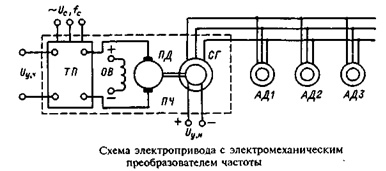
На рисунке приведена схема вентильно-электромашинного преобразователя частоты, в котором регулирование скорости синхронного генератора производится по системе ТП-Д. Здесь вместо электромашинного агрегата, вырабатывающего регулируемое напряжение постоянного тока, применен более экономичный тиристорный преобразователь. Однако и в этом случае преобразователь частоты содержит три ступени преобразования энергии, из них две - электромеханического преобразования. Схема непосредственного регулирования скорости по системе ТП-Д проще и дешевле, поэтому применение системы ПЧ-АД, показанной на рисунке, может иметь место только в специальных установках, например в случаях, когда двигатель постоянного тока не может быть применен для привода исполнительного механизма по техническим условиям.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
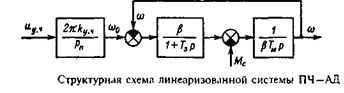
В данной схеме присутствуют два канала управления: канал управления частотой (Uyч), воздействующий на скорость синхронного генератора СГ, и канал управления напряжением, воздействующий на возбуждение СГ(Uун).
Канал регулирования частоты имеет структуру системы ТП-Д (см. рис.) и обладает значительной инерционностью, обусловленной механической инерцией преобразовательного агрегата ПД-СГ. Канал регулирования напряжения также инерционен в связи с наличием электромагнитной инерции цепи возбуждения синхронного генератора. Поэтому как объект управления представленная на рисунке система обладает неблагоприятными свойствами.
Наименьшим числом ступеней преобразования энергии обладают вентильные преобразователи частоты Они содержат ступень преобразования переменного тока в постоянный и ступень инвертирования. Эти две ступени в самостоятельном виде присутствуют в преобразователях частоты со звеном постоянного тока В преобразователе частоты с непосредственной связью функции выпрямления и инвертирования совмещены в реверсивном преобразователе постоянного тока, выпрямленное напряжение или ток которого изменяются с требуемой частотой с помощью системы управления преобразователем. Как следствие, наиболее близкими к системе ТП-Д массогабаритными показателями обладает система ПЧ-АД с преобразователем с непосредственной связью, а система с преобразователями, содержащими ступень постоянного тока, уступает по этим показателям системе ТП-Д. Однако различия по мере совершенствования вентильных преобразователей частоты постепенно сокращаются, и существенные преимущества асинхронного двигателя определяют несомненную перспективность системы ПЧ-АД.
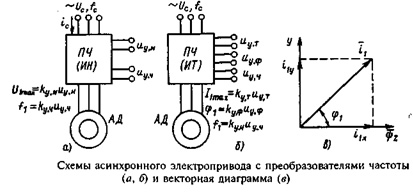
Известно, что вентильные преобразователи частоты могут обладать либо свойствами источника напряжения, либо свойствами источника тока. В первом случае наряду со входом управления частотой Uy.ч преобразователь имеет вход управления напряжением Uун (рис. a). В случае инвертора тока регулирование магнитного потока машины при регулировании частоты осуществляется по входу управления током Uут (рис. б).
Канал управления частотой может осуществлять либо дискретное, либо непрерывное формирование частоты напряжения и тока. При непрерывном формировании синусоидальных напряжений или токов заданной частоты его можно считать практически безынерционным. Канал управления напряжением или током воздействует на тиристорный преобразователь, и его быстродействие может оцениваться быстродействием этого управляемого преобразователя.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе