
Для определения направления движения объекта необходимо знать его курс, т. е. угол, составленный проекцией вектора скорости оси объекта на плоскость горизонта и направлением меридиана. Для измерения курса применяют самые разнообразные методы: магнитные, гироскопические, астрономические и радиотехнические. Не останавливаясь на рассмотрении принципов работы курсовых приборов, основанных на перечисленных методах, можно отметить, что ни один из них не может обеспечить точное измерение курса при различных параметрах и в разных условиях движения.
Каждая из курсовых систем имеет свои недостатки и достоинства; недостатки одной системы в какой-то мере перекрываются достоинствами другой. Поэтому в настоящее время применяются комплексные курсовые системы, объединяющие различные измерители курса, что имеет целый ряд преимуществ по сравнению с раздельным применением курсовых приборов. Вместе с тем проводятся исследования по изысканию новых методов измерения курса, еще более точных, надежных и быстродействующих. Так, например, считается возможным использовать в качестве компаса прибор, чувствительным элементом которого является лазерный гироскоп.
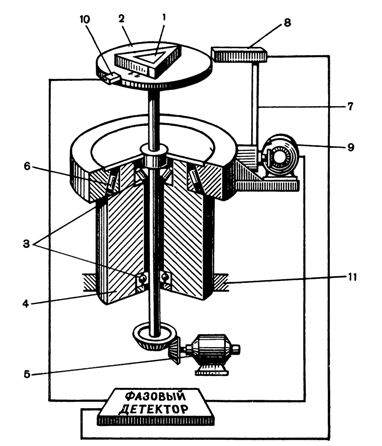
Рис.1 Конструктивная схема лазерного гирокомпаса
На рис.1 представлена упрощенная конструктивная схема такого лазерного гироскопа. Гелий-неоновый кольцевой лазер 1, заключенный в кварцевый монолитный блок, установлен на плоской плите 2. Плита в свою очередь прикреплена к металлическому валу, установленному в подшипниках 3. С помощью двигателя 5 плита с лазерным гироскопом приводится во вращение с постоянной скоростью вокруг вертикальной оси. На корпусе 4, имеющем цилиндрическую форму, устанавливается подшипник 6. Внутреннее кольцо подшипника насажено на корпус, а наружное запрессовано в кольцеобразное основание кронштейна 7, на котором укреплен отсчетный источник света 5. Таким образом, источник света также имеет возможность вращаться вокруг той же вертикальной оси. Его вращает серводвигатель 9, управляемый сигналами с фотоэлектронного умножителя 10 и отсчетного источника света, сравниваемыми на фазовом детекторе. Корпус 4 монтируется на платформе 11, заключенной в карданный подвес и стабилизируемой в плоскости горизонта с помощью управляющих сигналов по крену и тангажу, снимаемых с центральной гировертикали.
Коротко рассмотрим принцип работы такого гирокомпаса. Как известно, частота биений светового сигнала кольцевого лазера пропорциональна угловой скорости Ω его вращения, вектор которой совпадает с направлением оси чувствительности лазерного гироскопа. Ось чувствительности лазерного гироскопа в данном случае расположена в плоскости горизонта и перпендикулярна плоскости плиты 2. Угловая скорость, которую гироскоп измеряет, есть проекция горизонтальной составляющей вектора вращения Земли uг на направление оси чувствительности гироскопа. Направление оси чувствительности определяется положением плиты 2 в азимутальной плоскости. При этом горизонтальная составляющая вектора uг вращения Земли совпадает с направлением меридиана. В рассматриваемой конструкции плита с гироскопом приводится во вращение вокруг вертикальной оси, перпендикулярной оси чувствительности, с постоянной угловой скоростью от двигателя 5, также установленного на стабилизированной платформе. При этом сигнал, снимаемый с гироскопа, будет максимальным в момент, когда плита при своем вращении займет положение, перпендикулярное вектору горизонтальной составляющей скорости Земли, и минимальным при параллельном положении плиты относительно вектора горизонтальной составляющей скорости Земли (на экваторе).
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз, а первые результаты появляются уже в течение первых 7 дней. Зарегистрироваться и Начать продвижение
Таким образом, при вращении плиты 2 с постоянной скоростью сигнал, полученный с лазерного гироскопа, становится частотно-модулированным. Период модуляции соответствует скорости вращения плиты 2. Модулированные колебания с фазоэлектронного умножителя детектируются дискриминатором, с выхода которого снимается синусоидальное напряжение с частотой модуляции. Отсчетный источник света, расположенный около оси вращения, выдает импульс света каждый раз, когда луч его перпендикулярен плоскости плиты 2. Эти импульсы подаются на фазовый детектор для выделения фазы выходного напряжения дискриминатора. На рис.2 приведены временные диаграммы, поясняющие рассмотренное.
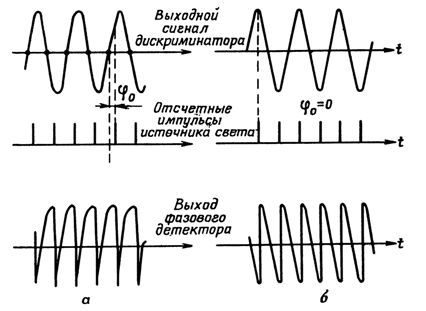
Рис.2 Временные диаграммы сигналов лазерного гирокомпаса:
а — луч от источника света не совпадает с направлением магнитного меридиана; б — луч от источника света совпадает с направлением магнитного меридиана
С помощью фазового детектора можно измерить фазу между отсчетным импульсом и экстремумами выходного сигнала дискриминатора. Если луч от отсчетного источника света не параллелен вектору uг т. е. его направление не совпадает с направлением меридиана (фаза между экстремумом сигнала и началом отсчетного импульса не равна нулю), то с интегрального выхода фазового детектора снимается сигнал ошибки в виде напряжения, величина и знак которого зависят от фазы Фо между экстремумом сигнала и отсчетным импульсом.
Но в то же время φ0 есть угол между двумя последовательными положениями плиты, где первое соответствует моменту времени, когда перпендикуляр к плите не совпадает с направлением меридиана (рис. 2, а), а второе — когда он совпадает с направлением меридиана (рис. 2,б). Напряжение с выхода фазового детектора подается на серводвигатель, который устанавливает начало отсчета, т. е. вращает источник света до тех пор, пока сигнал ошибки с выхода фазового детектора не станет симметричным по форме (при φ0=0). При этом луч света совпадет с направлением вектора uг и укажет направление на север.
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно. Зарегистрироваться в сервисе
Для данного прибора основными ошибками являются систематические, возникающие вследствие неточностей периодов вращения плиты из-за дефектов вала и подшипников. Однако тщательной регулировкой эти ошибки могут быть уменьшены и даже полностью исключены, если отказаться от динамического метода измерений, т. е. не вращать плиту вокруг оси, параллельной плоскости лазера. Однако при статическом методе измерений время, необходимое для определения северного направления, значительно увеличится.
Использование лазерного гироскопа в курсовых системах позволит значительно улучшить их характеристики по точности определения курса и быстродействию.